16 | 编排其实很简单:谈谈“控制器”模型





讲述:张磊
时长07:50大小3.60M
你好,我是张磊。今天我和你分享的主题是:编排其实很简单之谈谈“控制器”模型。
在上一篇文章中,我和你详细介绍了 Pod 的用法,讲解了 Pod 这个 API 对象的各个字段。而接下来,我们就一起来看看“编排”这个 Kubernetes 项目最核心的功能吧。
实际上,你可能已经有所感悟:Pod 这个看似复杂的 API 对象,实际上就是对容器的进一步抽象和封装而已。
说得更形象些,“容器”镜像虽然好用,但是容器这样一个“沙盒”的概念,对于描述应用来说,还是太过简单了。这就好比,集装箱固然好用,但是如果它四面都光秃秃的,吊车还怎么把这个集装箱吊起来并摆放好呢?
所以,Pod 对象,其实就是容器的升级版。它对容器进行了组合,添加了更多的属性和字段。这就好比给集装箱四面安装了吊环,使得 Kubernetes 这架“吊车”,可以更轻松地操作它。
而 Kubernetes 操作这些“集装箱”的逻辑,都由控制器(Controller)完成。在前面的第 12 篇文章《牛刀小试:我的第一个容器化应用》中,我们曾经使用过 Deployment 这个最基本的控制器对象。
现在,我们一起来回顾一下这个名叫 nginx-deployment 的例子:
这个 Deployment 定义的编排动作非常简单,即:确保携带了 app=nginx 标签的 Pod 的个数,永远等于 spec.replicas 指定的个数,即 2 个。
这就意味着,如果在这个集群中,携带 app=nginx 标签的 Pod 的个数大于 2 的时候,就会有旧的 Pod 被删除;反之,就会有新的 Pod 被创建。
这时,你也许就会好奇:究竟是 Kubernetes 项目中的哪个组件,在执行这些操作呢?
我在前面介绍 Kubernetes 架构的时候,曾经提到过一个叫作 kube-controller-manager 的组件。
实际上,这个组件,就是一系列控制器的集合。我们可以查看一下 Kubernetes 项目的 pkg/controller 目录:
这个目录下面的每一个控制器,都以独有的方式负责某种编排功能。而我们的 Deployment,正是这些控制器中的一种。
实际上,这些控制器之所以被统一放在 pkg/controller 目录下,就是因为它们都遵循 Kubernetes 项目中的一个通用编排模式,即:控制循环(control loop)。
比如,现在有一种待编排的对象 X,它有一个对应的控制器。那么,我就可以用一段 Go 语言风格的伪代码,为你描述这个控制循环:
在具体实现中,实际状态往往来自于 Kubernetes 集群本身。
比如,kubelet 通过心跳汇报的容器状态和节点状态,或者监控系统中保存的应用监控数据,或者控制器主动收集的它自己感兴趣的信息,这些都是常见的实际状态的来源。
而期望状态,一般来自于用户提交的 YAML 文件。
比如,Deployment 对象中 Replicas 字段的值。很明显,这些信息往往都保存在 Etcd 中。
接下来,以 Deployment 为例,我和你简单描述一下它对控制器模型的实现:
-
Deployment 控制器从 Etcd 中获取到所有携带了“app: nginx”标签的 Pod,然后统计它们的数量,这就是实际状态;
-
Deployment 对象的 Replicas 字段的值就是期望状态;
-
Deployment 控制器将两个状态做比较,然后根据比较结果,确定是创建 Pod,还是删除已有的 Pod(具体如何操作 Pod 对象,我会在下一篇文章详细介绍)。
可以看到,一个 Kubernetes 对象的主要编排逻辑,实际上是在第三步的“对比”阶段完成的。
这个操作,通常被叫作调谐(Reconcile)。这个调谐的过程,则被称作“Reconcile Loop”(调谐循环)或者“Sync Loop”(同步循环)。
所以,如果你以后在文档或者社区中碰到这些词,都不要担心,它们其实指的都是同一个东西:控制循环。
而调谐的最终结果,往往都是对被控制对象的某种写操作。
比如,增加 Pod,删除已有的 Pod,或者更新 Pod 的某个字段。这也是 Kubernetes 项目“面向 API 对象编程”的一个直观体现。
其实,像 Deployment 这种控制器的设计原理,就是我们前面提到过的,“用一种对象管理另一种对象”的“艺术”。
其中,这个控制器对象本身,负责定义被管理对象的期望状态。比如,Deployment 里的 replicas=2 这个字段。
而被控制对象的定义,则来自于一个“模板”。比如,Deployment 里的 template 字段。
可以看到,Deployment 这个 template 字段里的内容,跟一个标准的 Pod 对象的 API 定义,丝毫不差。而所有被这个 Deployment 管理的 Pod 实例,其实都是根据这个 template 字段的内容创建出来的。
像 Deployment 定义的 template 字段,在 Kubernetes 项目中有一个专有的名字,叫作 PodTemplate(Pod 模板)。
这个概念非常重要,因为后面我要讲解到的大多数控制器,都会使用 PodTemplate 来统一定义它所要管理的 Pod。更有意思的是,我们还会看到其他类型的对象模板,比如 Volume 的模板。
至此,我们就可以对 Deployment 以及其他类似的控制器,做一个简单总结了:
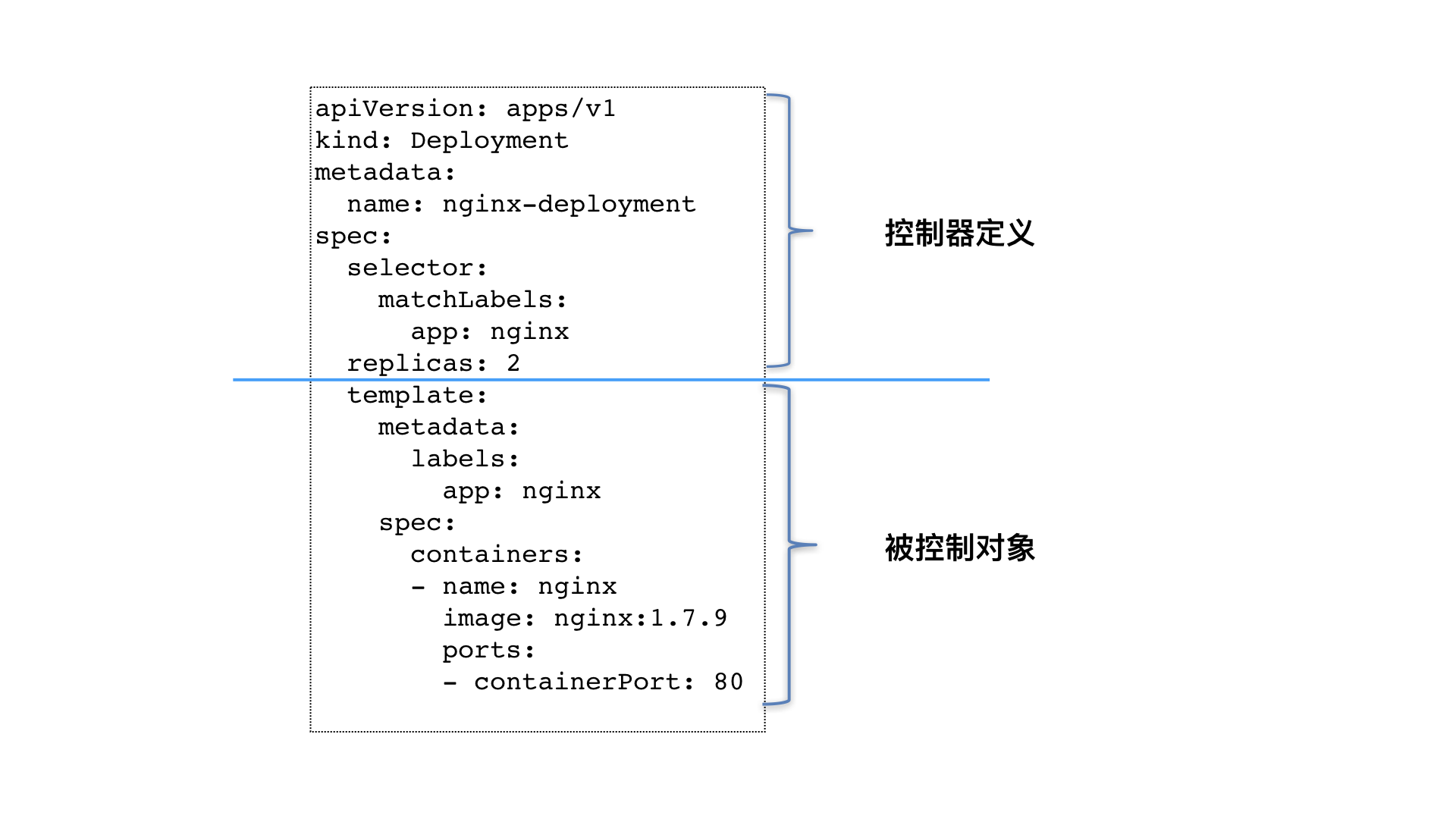
如上图所示,类似 Deployment 这样的一个控制器,实际上都是由上半部分的控制器定义(包括期望状态),加上下半部分的被控制对象的模板组成的。
这就是为什么,在所有 API 对象的 Metadata 里,都有一个字段叫作 ownerReference,用于保存当前这个 API 对象的拥有者(Owner)的信息。
那么,对于我们这个 nginx-deployment 来说,它创建出来的 Pod 的 ownerReference 就是 nginx-deployment 吗?或者说,nginx-deployment 所直接控制的,就是 Pod 对象么?
这个问题的答案,我就留到下一篇文章时再做详细解释吧。
总结
在今天这篇文章中,我以 Deployment 为例,和你详细分享了 Kubernetes 项目如何通过一个称作“控制器模式”(controller pattern)的设计方法,来统一地实现对各种不同的对象或者资源进行的编排操作。
在后面的讲解中,我还会讲到很多不同类型的容器编排功能,比如 StatefulSet、DaemonSet 等等,它们无一例外地都有这样一个甚至多个控制器的存在,并遵循控制循环(control loop)的流程,完成各自的编排逻辑。
实际上,跟 Deployment 相似,这些控制循环最后的执行结果,要么就是创建、更新一些 Pod(或者其他的 API 对象、资源),要么就是删除一些已经存在的 Pod(或者其他的 API 对象、资源)。
但也正是在这个统一的编排框架下,不同的控制器可以在具体执行过程中,设计不同的业务逻辑,从而达到不同的编排效果。
这个实现思路,正是 Kubernetes 项目进行容器编排的核心原理。在此后讲解 Kubernetes 编排功能的文章中,我都会遵循这个逻辑展开,并且带你逐步领悟控制器模式在不同的容器化作业中的实现方式。
思考题
你能否说出,Kubernetes 使用的这个“控制器模式”,跟我们平常所说的“事件驱动”,有什么区别和联系吗?
感谢你的收听,欢迎你给我留言,也欢迎分享给更多的朋友一起阅读。

精选留言(23)
 jasine2018-09-28 79除了上面朋友提到的主动与被动区别,事件往往是一次性的,如果操作失败比较难处理,但是控制器是循环一直在尝试的,更符合kubernetes申明式API,最终达到与申明一致,这样理解对吗
jasine2018-09-28 79除了上面朋友提到的主动与被动区别,事件往往是一次性的,如果操作失败比较难处理,但是控制器是循环一直在尝试的,更符合kubernetes申明式API,最终达到与申明一致,这样理解对吗作者回复: 厉害。这个就说到点子上了。
 melon2018-09-28 19相当于select和epoll的区别展开
melon2018-09-28 19相当于select和epoll的区别展开作者回复: 太专业啦
 小小笑儿2018-09-28 14deployment会创建rs,然后由rs创建pod,所以pod的owner应该是rs?
小小笑儿2018-09-28 14deployment会创建rs,然后由rs创建pod,所以pod的owner应该是rs?作者回复: 明白人。
 龙坤2018-09-28 8老师,大概可以这样理解吧。一个是主动,一个被动
龙坤2018-09-28 8老师,大概可以这样理解吧。一个是主动,一个被动
“事件驱动”,对于控制器来说是被动,只要触发事件则执行,对执行后不负责,无论成功与否,没有对一次操作的后续进行“监控”
“控制器模式”,对于控制器来说是主动的,自身在不断地获取信息,起到事后“监控”作用,知道同步完成,实际状态与期望状态一致展开作者回复: 基本正确。
 包子2018-09-28 5控制器主动获取pod状态,在这个集群中,有那么多pod,某个pod在某一时刻状态有变,怎样及时通知到控制器呢?展开
包子2018-09-28 5控制器主动获取pod状态,在这个集群中,有那么多pod,某个pod在某一时刻状态有变,怎样及时通知到控制器呢?展开作者回复: informer机制,后面会讲到
 Anker2018-09-28 4控制器模型是在一个循环中主动收集各个pod的运行状态,预先知道自己要处理哪些模块,然后比较状态来触发对应的操作,有点像有序同步操作。
Anker2018-09-28 4控制器模型是在一个循环中主动收集各个pod的运行状态,预先知道自己要处理哪些模块,然后比较状态来触发对应的操作,有点像有序同步操作。
事件驱动模型是一个异步回调过程,各个模块向控制器注册好事件方法,当模块自己检测到事件发生了,则将事件添加到控制器处理队列,控制器不关心各个模块状态,只关心队列中是否有事件。
请指正。展开 蜗牛2018-10-07 2有一个疑问没太弄清楚, 比如Deployment, 是我创建一个Deployment 就会生成一个对应的 Deployment-Controller 实例来管理该它 还是整个k8s系统只有一个 Deployement-Controller 来同一管理该系统的所有Deployment呢?展开
蜗牛2018-10-07 2有一个疑问没太弄清楚, 比如Deployment, 是我创建一个Deployment 就会生成一个对应的 Deployment-Controller 实例来管理该它 还是整个k8s系统只有一个 Deployement-Controller 来同一管理该系统的所有Deployment呢?展开作者回复: 当然只有一个controller
 Vincen2018-09-28 2后面文章会讲watch机制吗?展开
Vincen2018-09-28 2后面文章会讲watch机制吗?展开作者回复: 会的
 哈哼2019-02-21 1面向目标的代码好写,不用处理event失败,丢了等问题,因为这些问题很不好处理
哈哼2019-02-21 1面向目标的代码好写,不用处理event失败,丢了等问题,因为这些问题很不好处理 Jeff.W2018-10-15 1唯一的不变就是变化本身,你所看到的稳定不变的状态,都是有人在默默付出的。pod的稳定状态,背后控制器的默默奉献~展开
Jeff.W2018-10-15 1唯一的不变就是变化本身,你所看到的稳定不变的状态,都是有人在默默付出的。pod的稳定状态,背后控制器的默默奉献~展开 chf0072018-10-10 1我可以先写Pod,再写Deployment,不写 template,只靠标签控制 Pod 么?
chf0072018-10-10 1我可以先写Pod,再写Deployment,不写 template,只靠标签控制 Pod 么?
K8s只靠标签进行match控制,如果万一写错便签会不会直接调度了以前就存在的Pod,但是 不是我想要操作的 Pod 呢?展开作者回复: 不可以,控制器需要使用模版。的确会有重合的可能。
 北卡2018-10-02 1对于十一还在上班的我,摸鱼时间看这套教程让我感到了莫大的快乐。
北卡2018-10-02 1对于十一还在上班的我,摸鱼时间看这套教程让我感到了莫大的快乐。 Spark2018-09-29 1老师,我是初学者,这个课程让我获益匪浅,但每次都有很多问题想问但无人解答。请问能不能建一个交流群,大家共同讨论学习。展开
Spark2018-09-29 1老师,我是初学者,这个课程让我获益匪浅,但每次都有很多问题想问但无人解答。请问能不能建一个交流群,大家共同讨论学习。展开作者回复: 极客时间好像马上要上线这个功能
 A-2018-09-28 1我理解:
A-2018-09-28 1我理解:
事件驱动是被动的:被控制对象要自己去判断是否需要被编排,调度。实时将事件通知给控制器。
控制器模式是主动的:被控制对象只需要实时同步自己的状态(实际由kubelet做的),具体的判断逻辑由控制去做。
不对请指正展开作者回复: 基本正确,还可以再深入
 outyua2019-01-24ownerReference 应该是metadata下全部的kv吧展开
outyua2019-01-24ownerReference 应该是metadata下全部的kv吧展开 勇敢的心2019-01-08复习一下展开
勇敢的心2019-01-08复习一下展开 jimmy2018-10-18命令式api和声明式api的区别展开
jimmy2018-10-18命令式api和声明式api的区别展开 广宇2018-10-06控制器的作用是确保对象处在所定义的状态上,这跟很多运维自动化工具中的概念是类似的,确保一致性,不一致的要回归收敛到一致。展开
广宇2018-10-06控制器的作用是确保对象处在所定义的状态上,这跟很多运维自动化工具中的概念是类似的,确保一致性,不一致的要回归收敛到一致。展开- Leon廖2018-09-30“事件驱动”是一种宽松的侧重于事件的传播通知模式,并不涉及对通知处理模式的定义。而控制器模式定义了对预期状态和期望状态的通用处理模式。控制器模式可以利用“事件驱动”模式来收集状态信息。
- 陈华2018-09-30终于追上来了,哈哈哈哈,展开
















